Abstract
The importance of swarm robotics systems in both academic research and real-world applications is steadily increasing. However, to reach widespread adoption, new models that ensure the secure cooperation of large groups of robots need to be developed. This work introduces a method to encapsulate cooperative robotic missions in an authenticated data structure known as a Merkle tree. With this method, operators can provide the “blueprint” of the swarm’s mission without disclosing its raw data. In other words, data verification can be separated from data itself.
Swarm robotic missions
- Maze-formation: This mission takes place in a 5x5 grid, where each cell represents a 0.5x0.5 m2 space. In this mission, robots need to discover and occupy cells in order to form a custom maze encoded in a Merkle tree shared by the robots. By exchanging cryptographic proofs, robots in the swarm are able to prove to their peers that they know specific pieces of information (i.e., already occupied cells) included in the swarm's mission and therefore that they are cooperating towards its completion.
- Foraging: This mission takes place in the same arena as the maze-formation mission. However, in this scenario robots, objects to be retrieved (represented as colored cells), and a target area (0.5 x 0.5 m2) located at the center are placed. The foraging mission is finished when all tasks in a sequence are completed—that is, when all colored objects have been delivered by robots in the right order at the target location.
New business models for swarm robotic systems
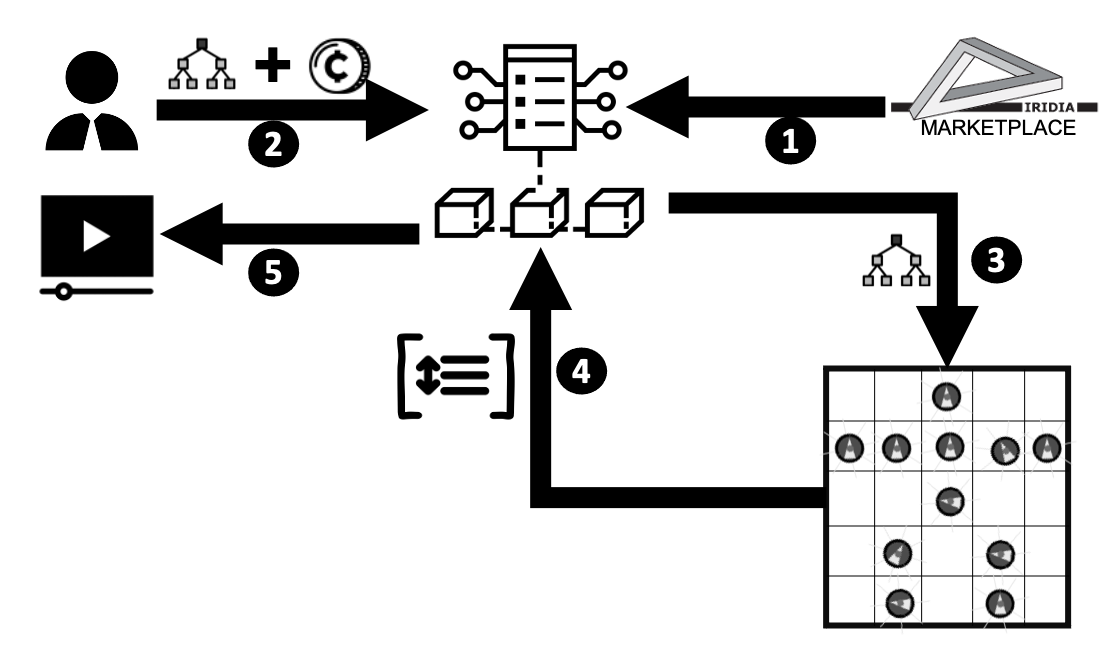
In the last section of this work we present a futuristic scenario where this research can be monetized. We introduce the IRIDIA Swarm Marketplace: a web-based service marketplace for swarm robotics whose logic is coded in a smart-contract and uploaded in the Ethereum blockchain. In the proposed app, organizations (in this case, IRIDIA, the artificial intelligence lab of the Université Libre de Bruxelles) with a robot swarm at their disposal can advertise the robotics services available to them (number of robots, duration of service, and price) (1). Then, customers are able to purchase these services and pay with their own crypto-wallets. Customers can upload a Merkle tree with the list of sequential tasks the robots need to complete (2). Robots receive the Merkle with all required tasks to complete a service (3). Once the service is completed, customers get the cryptographic proof that the robots completed all the tasks included in the Merkle tree, which allows them to trust the system and understand the service was not faked (4). Finally, customers get pictures and video footage of the final work the robots conducted. Videos are automatically uploaded by the system to a Youtube playlist (5).
Conclusions
Publications
Research Line
Swarm Robotics
Swarms of robots will revolutionize many industrial applications, from targeted material delivery to precision farming. However, several of the heterogeneous characteristics that make them ideal for certain future applications (e.g, robot autonomy, decentralized control, collective emergent behavior) hinder the evolution of the technology from academic institutions to real-world problems. In …
View Research LineTeam Members

Eduardo Castelló Ferrer
Assistant Professor - School of Science & Technology