Abstract
Tangible Swarm is a tool that displays relevant information about a robotics system (e.g., multi-robot, swarm, etc.) in real time while the system is physically conducting its mission. Information such as robots' IDs, sensor inputs, robot trajectories, distance between robots, battery status, communication patterns, etc. can be easily displayed and customized for different missions and scenarios.
System architecture
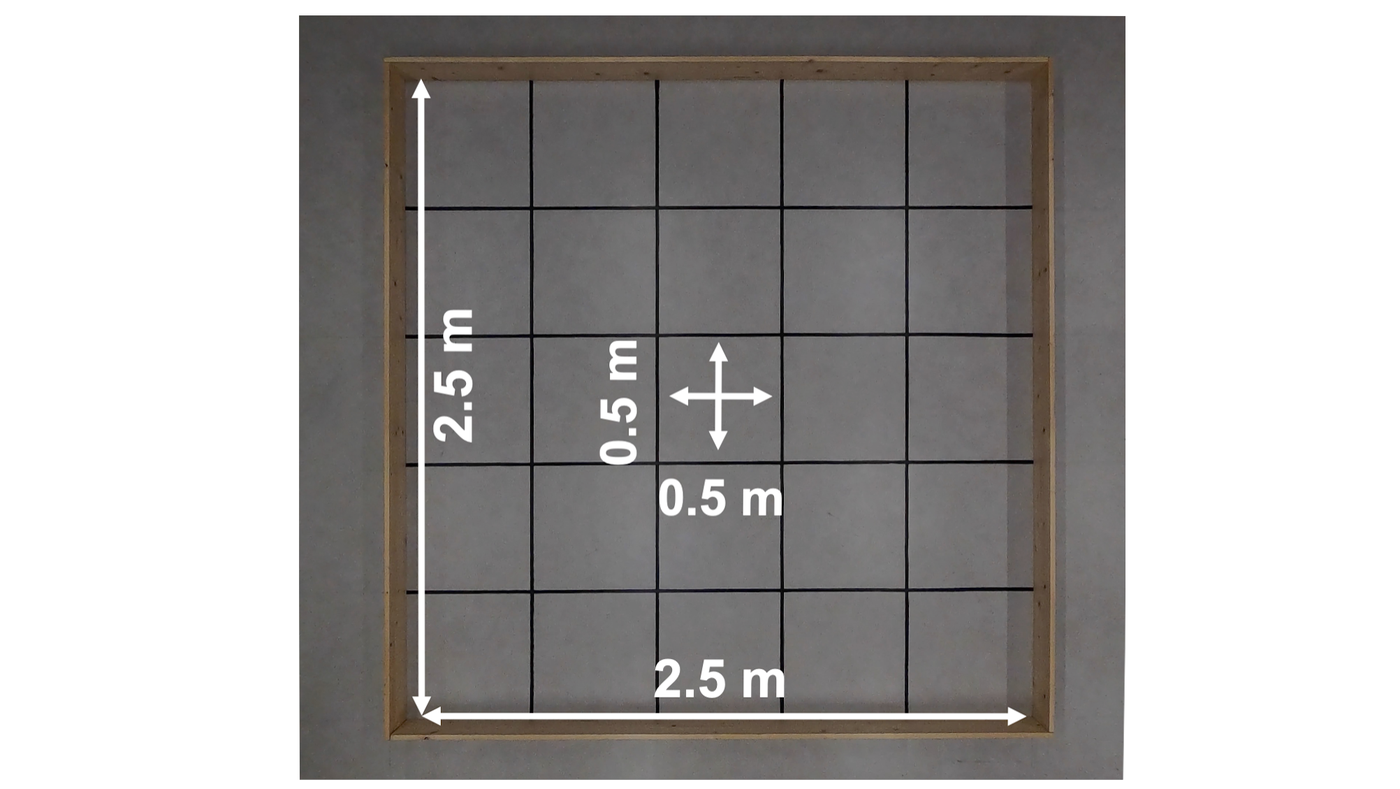
Fig. 1 - Bird's eye view of the arena built for the experiments. The arena is a rectangular area of 2.5 x 2.5 m2 delimited by 4 wooden planks attached to each other using hot melt glue.
Fig. 2 shows a diagram of the arrangement of the sensing module; a camera performing the tracking of the robots and of the actuation component; a projector displaying information on the arena.
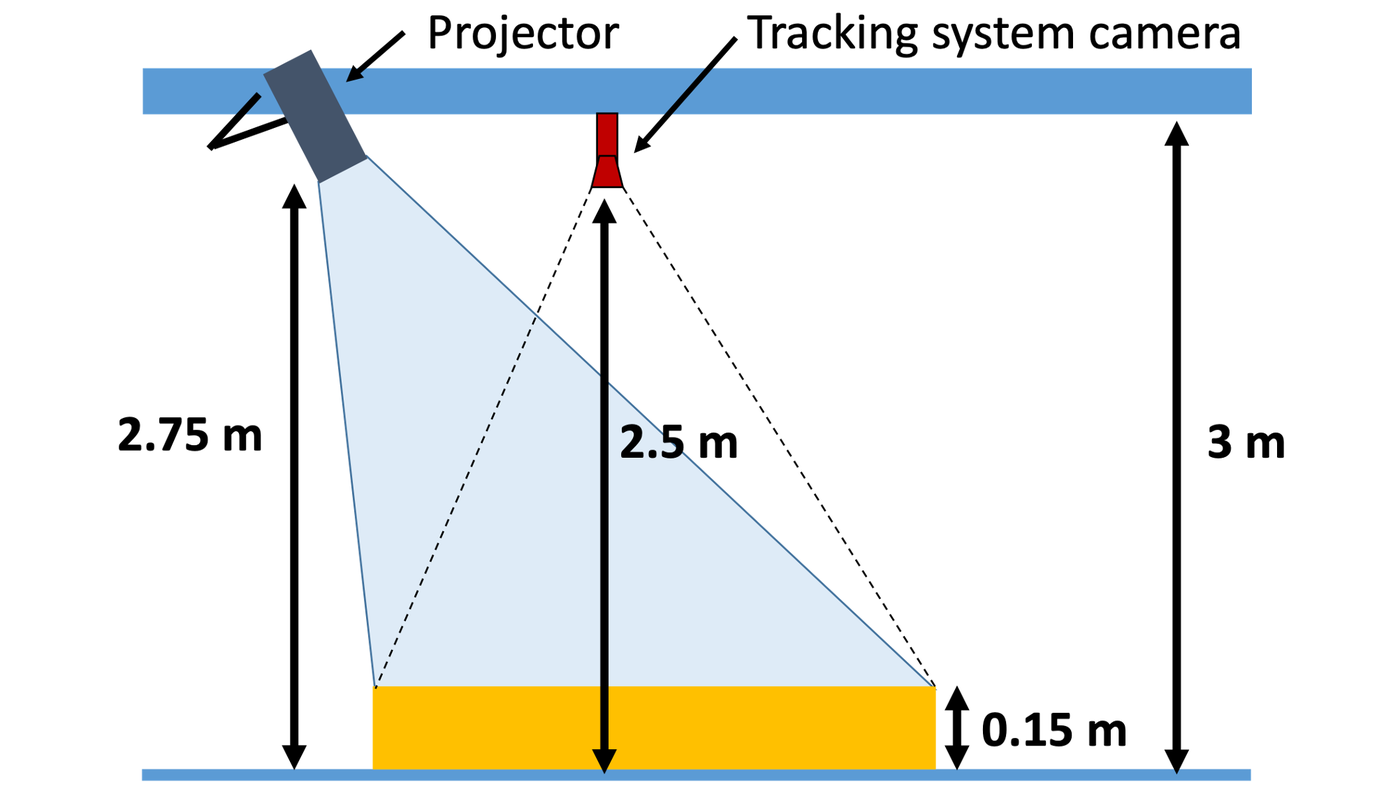
Fig. 2 - Diagram with the physical disposition of the sensing (camera) and actuation (projector) elements
Fig. 3 shows the information workflow that takes place during these experiments. First, each robot (e-puck) carries a tag; this tag encodes a specific robot ID used in the system. Second, tags are recognized by a vision-based tracking system using a camera right on top of the arena. Third, (x,y,z) coordinates for each tag are calculated with respect to the bottom-left corner of the arena and sent to a ROS multi-master network where the robots are connected in a decentralized manner. Robots publish information such as their battery level, neighbor IDs, sensor inputs, etc. into this network. Then, this information is extracted from the network and sent to Gama, an agent-based simulation software. With this information, Gama is able to create a virtual representation of the current state of the arena which is projected on the arena itself by using a short throw projector.
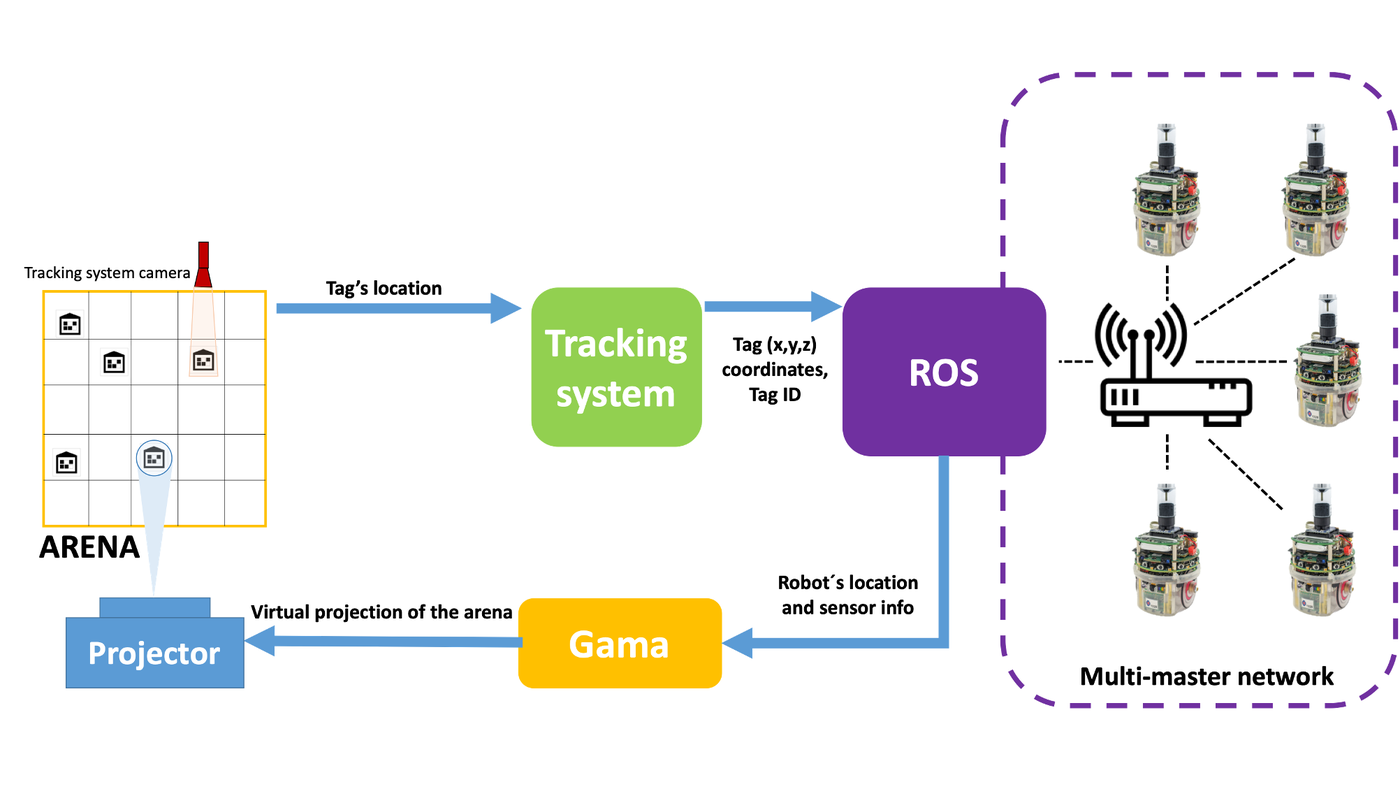
Fig. 3 - Information workflow for the Tangible Swarm tool.
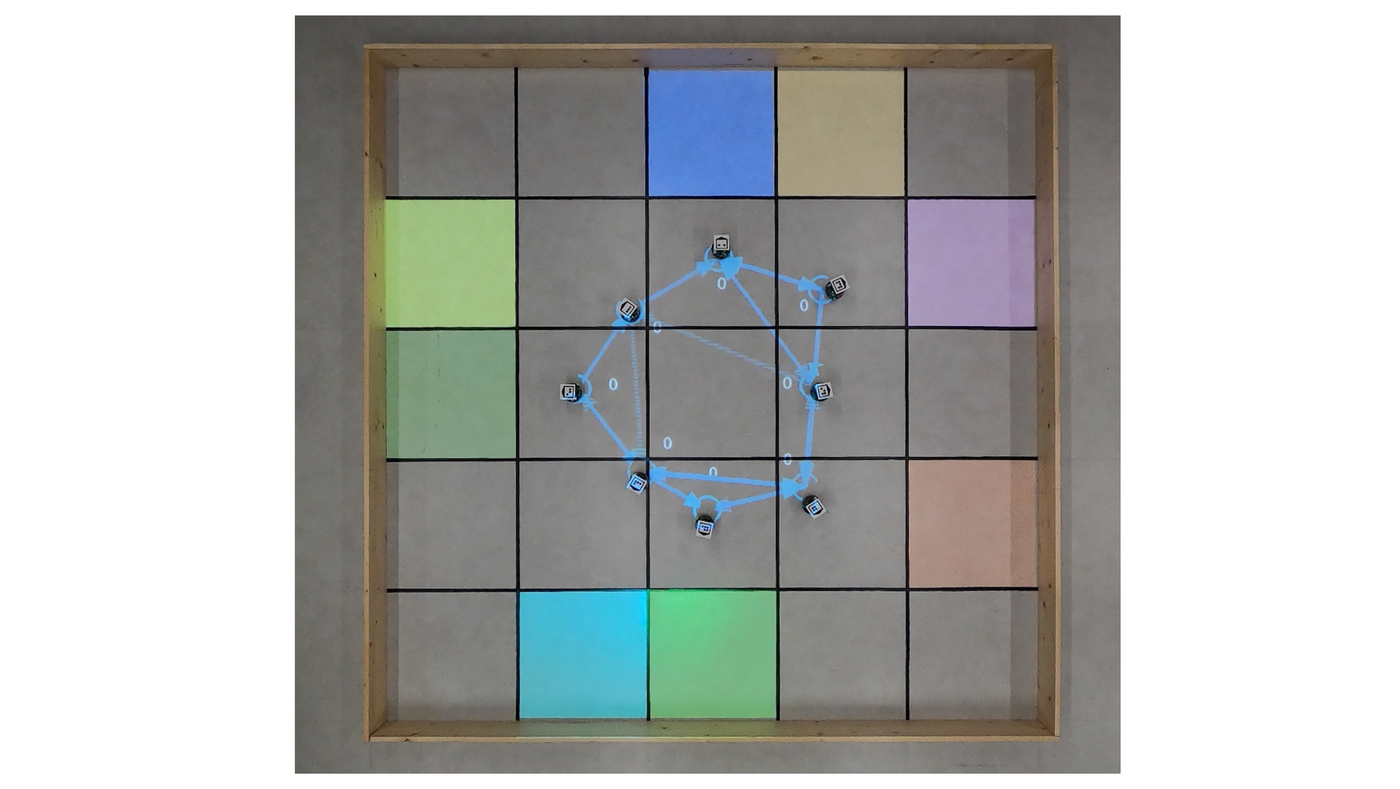
Finally, Fig. 4 shows a snapshot of an experiment where a rich virtual representation of the arena (e.g., colored cells, communication patterns between the robots, robot's internal variables, etc.) is projected on the arena and robots in real-time.
Research Lines
Tangible User Interfaces
Tangible User Interfaces (TUI) for human--computer interaction (HCI) provide the user with physical representations of digital information with the aim …
View Research Line
Swarm Robotics
Swarms of robots will revolutionize many industrial applications, from targeted material delivery to precision farming. However, several of the heterogeneous …
View Research LineTeam Members

Eduardo Castelló Ferrer
Assistant Professor - School of Science & Technology